

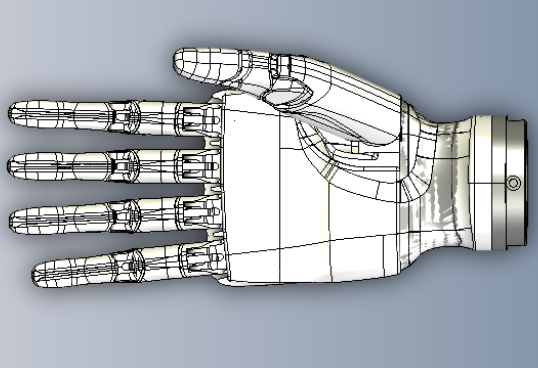
Amb el ràpid desenvolupament de la fabricació intel·ligent i la robòtica, la mà hàbil dels robots humanoides esdevé cada cop més important com a eina d'interacció amb el món exterior. La mà hàbil s'inspira en la complexa estructura i funció de la mà humana, cosa que permet als robots realitzar tasques diverses com ara agafar, manipular i fins i tot detectar. Amb el progrés continu de l'automatització industrial i la tecnologia de la intel·ligència artificial, les mans hàbils es transformen gradualment d'un únic intèrpret de tasques repetitives a un cos intel·ligent capaç de realitzar tasques complexes i variables. En aquest procés de transformació, la competitivitat de la mà hàbil domèstica ha anat apareixent gradualment, especialment en el dispositiu d'accionament, el dispositiu de transmissió, el dispositiu sensor, etc., el procés de localització és ràpid, l'avantatge de cost és evident.
Planetarirollerstripulacionssón la peça central de les "extremitats" d'un robot humanoide i es poden utilitzar en una varietat d'aplicacions, com ara braços, cames i mans hàbils, per proporcionar un control precís del moviment lineal. El tors Optimus de Tesla utilitza 14 articulacions rotatòries, 14 articulacions lineals i 12 articulacions de copa buida a la mà. Les articulacions lineals utilitzen 14 cargols de rodets planetaris invertits (2 al colze, 4 al canell i 8 a la cama), que es classifiquen en tres mides: 500 N, 3.900 N i 8.000 N, per adaptar-se a les necessitats de càrrega de les diferents articulacions.
L'ús de cargols de rodets planetaris invertits per part de Tesla en el seu robot humanoide Optimus pot basar-se en els seus avantatges en rendiment, especialment pel que fa a la capacitat de càrrega i la rigidesa. Tanmateix, no es pot descartar que els robots humanoides amb requisits de capacitat de càrrega més baixos utilitzin cargols de boles de menor cost.
Bolesequips en diferents indústries en una àmplia gamma d'aplicacions i demanda del mercat:
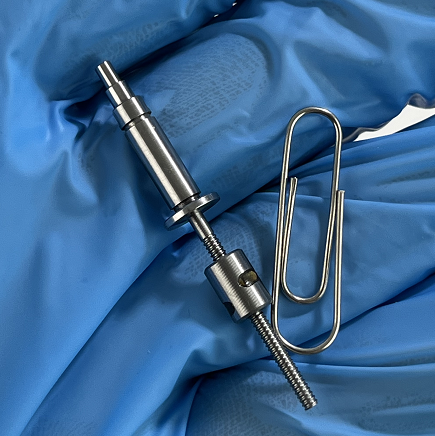
A l'Exposició de Robòtica de Pequín del 2024, KGG va exposar cargols de rodets planetaris de 4 mm de diàmetre i cargols de boles d'1,5 mm de diàmetre; a més, KGG també va exposar mans hàbils amb solucions integrades de cargols de rodets planetaris.


Cargols de rodets planetaris de 4 mm de diàmetre


1. Aplicacions en automòbils de nova energia: amb el desenvolupament de l'electrificació i la intel·ligència dels automòbils, l'aplicació depilotacargolsen el camp de l'automoció s'ha anat aprofundint, com ara el sistema de frenada per cable a la vora de la roda (EMB), el sistema de direcció a la roda posterior (iRWS), el sistema de direcció per cable (SBW), el sistema de suspensió, etc., així com els dispositius de regulació i control dels components de l'automoció.
2. L'aplicació de la indústria de les màquines-eina: el cargol de boles és un dels components bàsics estàndard de les màquines-eina, les màquines-eina contenen eixos rotatius i eixos lineals, els eixos lineals estan compostos per cargols irails de guiaper aconseguir un posicionament i moviment precisos de la peça. Les màquines-eina tradicionals utilitzen principalment cargols trapezoïdals / cargols lliscants, les màquines-eina CNC es basen en les màquines-eina tradicionals, afegint sistemes de control digital, els requisits de precisió de la peça d'accionament són més alts i actualment s'utilitzen més cargols de boles. La cadena de subministrament global de fàbriques de màquines-eina en el cargol, el capçal del pèndol, la taula giratòria i altres components funcionals de la majoria de les fàbriques de màquines-eina per a consideracions de personalització o diferenciació tendeixen a ser autoproduïdes i autoproduïdes, però els components funcionals de laminació són bàsicament tots subcontractats, juntament amb la indústria de les màquines-eina que actualitza els components funcionals de laminació de la demanda d'un creixement sostingut amb la certesa d'un fort creixement.


Cargols de boles d'1,5 mm de diàmetre
3. Aplicacions de robots humanoides: els actuadors de robots humanoides es divideixen en mecanismes hidràulics i motoritzats dels dos programes. El mecanisme hidràulic, tot i que el rendiment és millor, però els costos i els costos de manteniment són més elevats i actualment s'utilitza menys. La solució motoritzada és l'opció principal actual, el cargol de rodets planetaris té una forta capacitat de càrrega i és el component central delactuador linealdel robot humanoide, que s'utilitza per aconseguir un control precís de les articulacions del robot. Tesla a l'estranger, el robot LOLA d'Alemanya a la Universitat de Munic, el Politècnic nacional Huahui i Kepler van utilitzar aquesta via tecnològica.
Pel que fa als cargols de rodets planetaris, el mercat nacional actual de cargols de rodets planetaris està ocupat principalment per fabricants estrangers, els principals fabricants estrangers de Suïssa Rollvis, Suïssa GSA i Suècia Ewellix van representar la quota de mercat del 26%, 26%, 14%.
Hi ha una certa diferència entre les empreses nacionals i les empreses estrangeres en la tecnologia bàsica dels cargols planetaris, però la precisió del plom, la càrrega dinàmica màxima, la càrrega estàtica màxima i altres aspectes del rendiment s'estan recuperant gradualment, i la quota de mercat combinada dels fabricants nacionals de cargols planetaris és del 19%.
Data de publicació: 28 de febrer de 2025




